交运大新社 文/图 刘柔烨
为拓宽学生的学术视野,提高学生的科研能力及学术水平,加深学生对交通行业的理解,12月7日,交通运输学院王嵩博士以“分心驾驶机制建模及其在自动驾驶环境中对安全的影响”为主题面向交通运输学院全体学生开展了“双福·行远”学术讲座。
王嵩博士毕业于美国路易斯维尔大学,主要研究方向是车联网与自动驾驶、交通安全、人机交互与人因、交通政策规划。近年来,王博士主要参与KYTC、NSF等研究项目,其研究成果被写入“Vehicular Communication”维基百科中。
讲座开始,王博士通过自动驾驶的定义以及自动驾驶的五种等级分类和操作机制,结合交通事故举例,提出人机交互是解决自动驾驶环境中分心驾驶的重要手段。王博士提出,基于目前自动驾驶研究情况,分心驾驶机制在自动化驾驶环境的研究中存在五个研究空白:非自动驾驶状态下的分心驾驶程度量化、自动驾驶状态下的分心驾驶程度量化、自动驾驶状态下的分心驾驶程度预测、自动驾驶状态下分心程度对交通安全的影响、关于分心驾驶程度对交通安全的影响的解决措施。
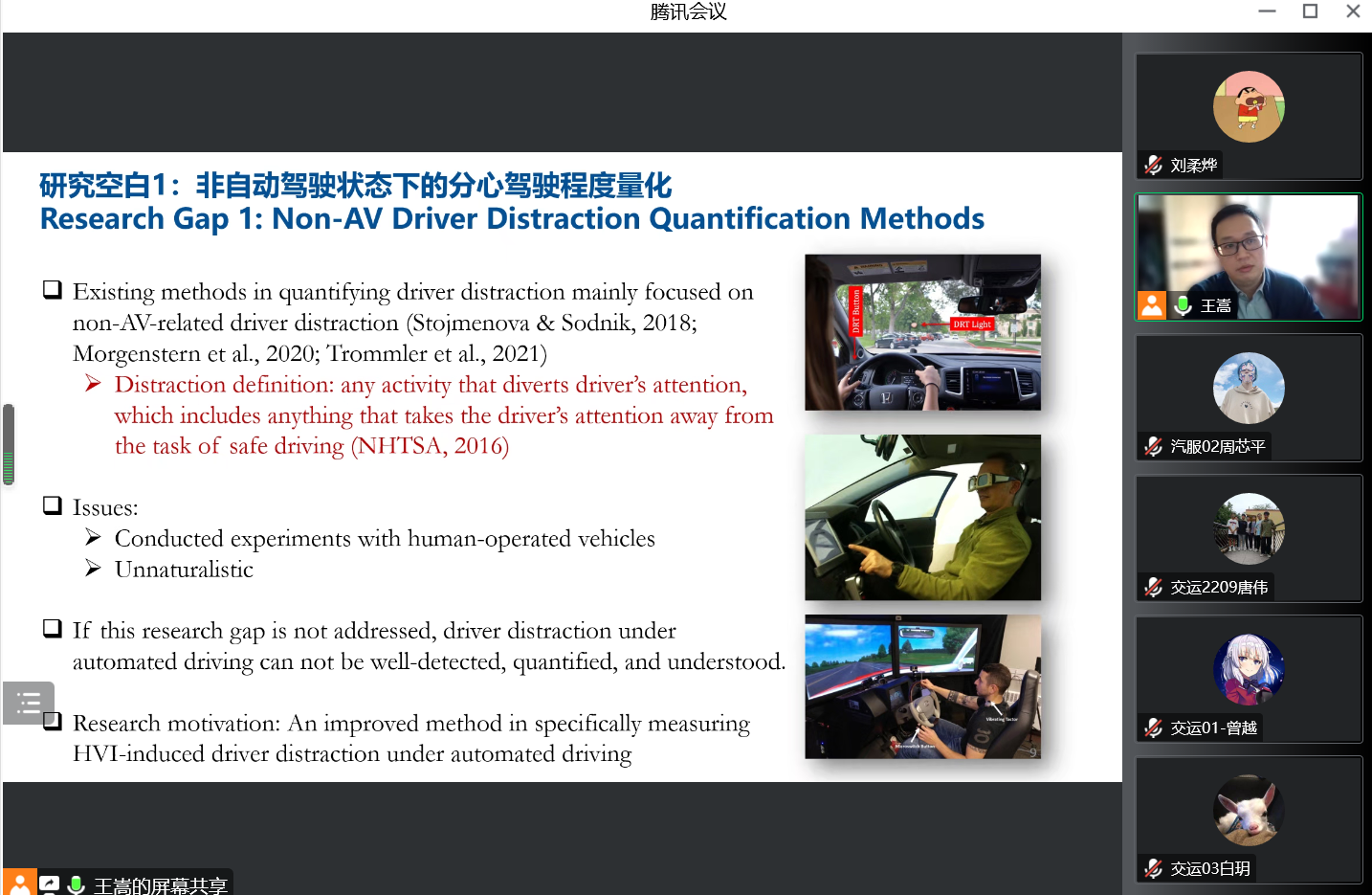
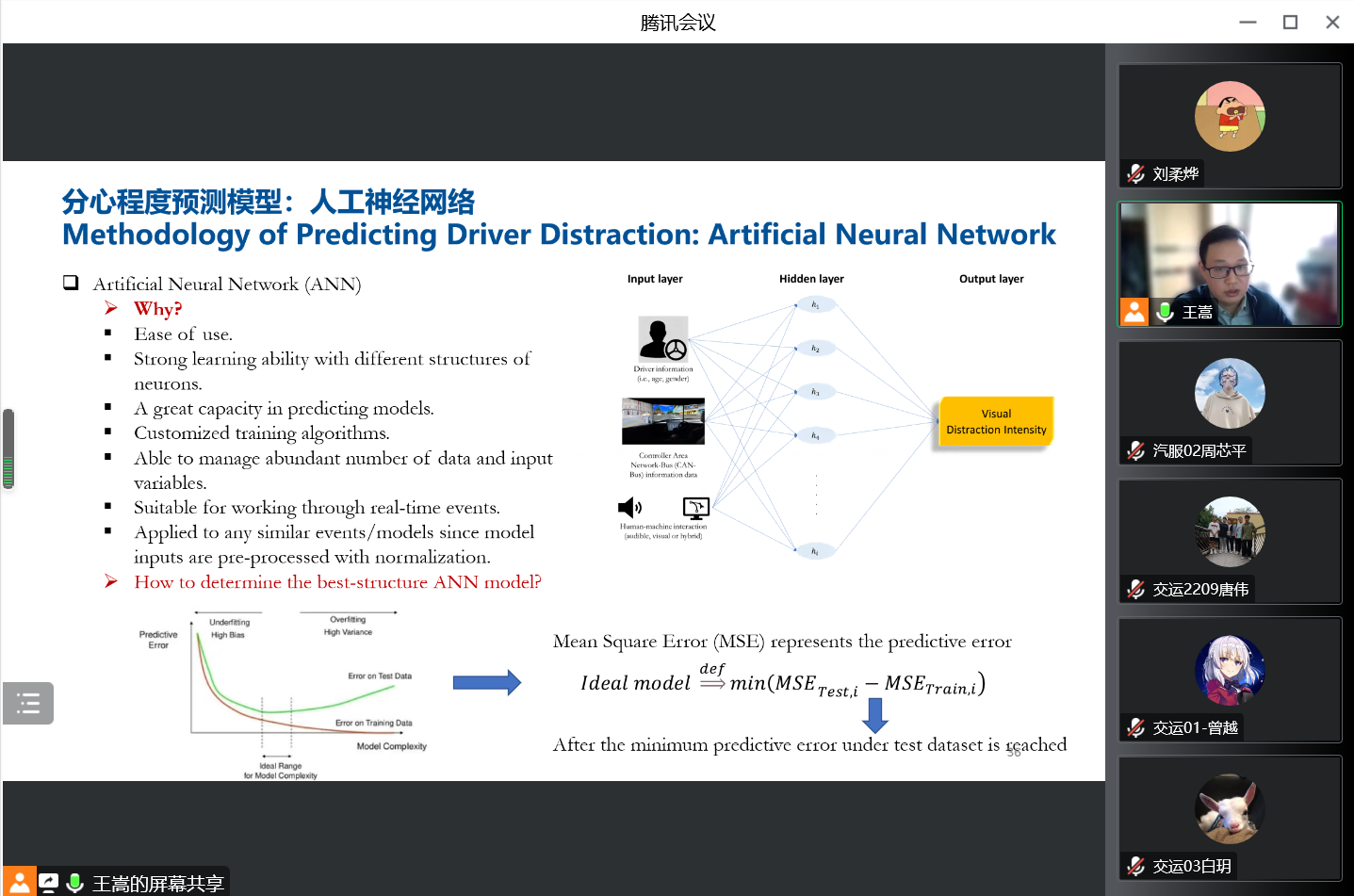
随后,王博士希望改进现有条件下驾驶员分心程度量化方法,开发传感器分心预测模型,进而定量揭示人机交互诱导的视觉和认知干扰在自动驾驶下危险事故的动态性质,建立以预测为导向的防撞系统。王博士提到视觉分心程度的建模和认知分心程度的建模,从两种不同的维度进行分析量化,打破大众对分心程度的一维认知,这也为人机交互研究设备的发展指明了新方向。
讲座最后,王博士提到未来自动驾驶发展前途大好,需要关注自动驾驶的安全性,并且希望相关系统未来可以更好地被优化,早日落地,减轻分心驾驶带来的安全隐患,减少交通事故的发生。
讲座结束以后,同学们就驾驶员分心程度的接管策略、分心预警提醒设备和研究设备产品化等问题向王博士提问,王博士从专业角度给予了分析和解答。通过这次讲座,同学们受益匪浅,从多维度了解自动驾驶以及分心程度机制建模,对启发专业性、创新性思维有很大帮助。
