在智慧交通安全问题得到重视的背景下,围绕我校自主式交通装备安全管控重点研究方向,交通运输学院教师张振源副教授针对城市高密度车流场景中车载毫米波雷达遭遇射频干扰攻击,导致道路运动目标感知结果失效的问题,系统研究了车载毫米波雷达在非完备信任条件下的微弱目标的弹性检测、跟踪方法。相关成果已经在国际机器人领域顶级期刊IEEE Transactions on Robotics (中科院一区TOP期刊,影响因子9.4)在线出版。

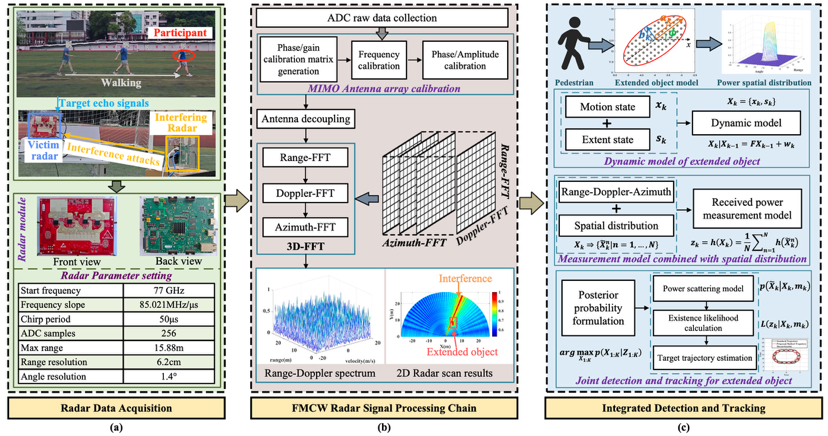
该成果聚焦解决多雷达非协作感知过程中,接收雷达回波信号受到攻击者发射信号射频干扰,导致幽灵目标和噪音大幅增加的问题,研究团队提出了一种新型的弱扩展目标联合抗干扰检测与跟踪系统,极大提升了弱目标的可检测性。为适应雷达散射点数目时变和扩展形态的空间时变性特性,系统利用自适应空间分布模型来捕捉感知轮廓随时间演变的动态信息。在此基础上,提出将所有后向散射点视为一个实体来匹配真实目标的新思路,避免了强干扰条件下目标检测、跟踪的可信关联难题。当前,该系统已在商用车载毫米波雷达平台上完成部署,验证了所提出方法的抗攻击有效性,其能够在遮挡、动态运动切换和多扩展目标等挑战场景中实现微弱扩展目标的高准确检测与高精度跟踪。
该研究得到了国家自然科学基金青年基金(62003064)的支持,同时得到安徽大学黄大荣教授,重庆邮电大学周牧教授,以及美国佐治亚理工学院 (Georgia Institute of Technology) Ying Zhang教授的悉心指导和大力支持。
